A := Matrix([[21/40,3/20],[-3/16,39/40]]);
Execute the Eigenvectors(A); command
If ___ equals 0 then we die off along the line____ [corresponding to the eigenvector____], and otherwise we [choose one: die off or grow or hit and then stayed fixed] along the line____ [corresponding to the the eigenvector____].
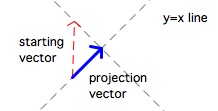
 takes (x,y) to (1/2 x + 1/2 y, 1/2 x +1/2 y), ie projected onto the y=x
line. If we look at light rays perpendicular to the y=x line, this matrix
gives
us the shadow a vector makes onto the y=x line, which has
many applications in mathematics and physics. In other words, given
a starting vector,
we drop the perpendicular to the y=x line, and the base of the
right triangle we form is the projection vector.
takes (x,y) to (1/2 x + 1/2 y, 1/2 x +1/2 y), ie projected onto the y=x
line. If we look at light rays perpendicular to the y=x line, this matrix
gives
us the shadow a vector makes onto the y=x line, which has
many applications in mathematics and physics. In other words, given
a starting vector,
we drop the perpendicular to the y=x line, and the base of the
right triangle we form is the projection vector.
A:=Matrix([[(cos(theta))^2,cos(theta)*sin(theta)],[cos(theta)*sin(theta),((sin(theta))^2)]]);
Notice that the eigenvalues are 0 and 1, just like in problem 5.
theta=Pi/2 When theta is Pi/2, the line of projection is the y-axis. The following pictures shows the blue outputs in the range (or Image) of A starting at the tip of the inputs so that we can visualize them all on one graph [in actuality all the blue vectors start at the origin].
theta=Pi/2
You should be able to identify the eigenvectors and eigenvalues from the picture.
Execute theta := Pi/2; Eigenvectors(A);
and compare with the above picture. The eigenvalue of 1 corresponds to vectors on the line of projection, and the eigenvalue of 0 corresponds to vectors perpendicular to the line of projection.
The matrix A projects vectors onto the line through the origin that makes an angle of theta degrees with the positive x-axis [in number 1 above, the line was y=x, ie theta was 45 degrees from the positive x-axis. In this case sin and cos are sqrt(2)/2, so the matrix has all entries of 1/2 like M does].
Notice that theta is labeled in the picture above, and I have created a right triangle to the x-axis so that we can use the trigonometry of the unit circle. The hypotenuse is the line of projection for A. Why is the x-value of point P in the picture above cos(theta)? Why is the y-value sin(theta)? Use this to show that the slope of the hypotenuse from (0,0) to P=(cos(theta), sin(theta)) is tan(theta). Since the y-intercept occurs at (0,0), this would tell us that the line of projection is y=tan(theta) x.
Explain why the first column is an eigenvector corresponding to the eigenvalue of 1, and why the second column is an eigenvector corresponding to an eigenvector of 0. Hint: Where do the vectors lie in relation to the line of projection y=tan(theta) x.
A:=Matrix([[(cos(theta))^2,cos(theta)*sin(theta)],[cos(theta)*sin(theta),((sin(theta))^2)]]);
Diag:=simplify(MatrixInverse(P).A.P)
What geometric transformation is Diag?