2240 class highlights
Wed Dec 12 9-11:30am
final research sessions
Thur Dec 6 Computer graphics continued, including the
benefit of derivatives and
unit length vectors in keeping a race track on a curve.
Discuss Yoda via the file yoda2.mw with
data from Lucasfilm LTD as on
Tim's Page which
has the data.
Final project topics and assign sessions
Evaluations
Tues Dec 4 Continue
transformations
Begin computer graphics demo via definition of
triangle := Matrix([[4,4,6,4],[3,9,3,3],[1,1,1,1]]); and then ASULearn
Computer Graphics Example D and the usefulness of transformations like
Tinverse.R.T. Look at Homogeneous 3D coordinates and Example G. Then Example
I, keeping an object along a curve. If time remains, show twister, the movie
and keeping a race track on a curve.
Thur Nov 29 Test 3 with Dr. Thomley while I am speaking
in Chicago.
Tues Nov 27 Take questions
If the column vector a=Matrix([[a1],[a2],...,,[an]]) is
a nontrivial eigenvector for A, as outputed by Maple, then A has
at least the eigenvectors as follows:
a) all of Rn
b) an entire line through the origin in Rn
c) just a and the 0 vector
d) just a
e) a and a second vector b that Maple outputs
If a matrix A has repeated eigenvalues then
a) A is diagonalizable
b) A is not diagonalizable
c) We cannot tell whether A is diagonalizable yet
Finish reflection on:
Linear Transformations: Chap 6 and
review the eigenvectors/eigenvalues.
Mention
Rural and Urban Populations and stability
Last few examples in the Dynamical systems demo on ASULearn, begining with
the dynamic graph of various intitial conditions and continuing.
We did not have time to get to
Chapter 7 review
Tues Nov 20
Clicker review of the problem set:
Is Matrix([[1,k],[0,1]]) diagonalizable?
a) yes
b) no
Given a square matrix A, to solve for eigenvalues and eigenvectors
a) (lambdaI - A)x=0 is equivalent, so,
since we are looking for nontrivial x solutions, that means that
this homogeneous system must have infinite solutions, so we can solve for
det(lambdaI- A)=0 via the theorem in Chapter 3.
b) Once we have a lambda that works, we can take the inverse of
(lambdaI- A) to solve for the eigenvectors
c) Once we have a lambda that works, we can create the augmented matrix
[lambdaI- A|0] and reduce to solve for solutions and write out a basis.
d) a and b
e) a and c
How many non-trivial real eigenvectors does
Matrix([[cos(pi),-sin(pi)],[sin(pi),cos(pi)]]) have?
a) 0
b) 1
c) 2
d) infinite
e) none of the above
How many linearly independent eigenvectors does
Matrix([[cos(pi),-sin(pi)],[sin(pi),cos(pi)]]) have?
a) 0
b) 1
c) 2
d) infinite
e) none of the above
Is
Matrix([[cos(pi),-sin(pi)],[sin(pi),cos(pi)]]) diagonalizable?
a) yes
b) no
How many nontrivial real eigenvectors does
Matrix([[cos(pi/2),-sin(pi/2)],[sin(pi/2),cos(pi/2)]]) have
a) 0
b) 1
c) 2
d) infinite
e) none of the above
Linear Transformations: Chap 6 and
review the eigenvectors/eigenvalues.
Show that a rotation matrix rotates algebraically as well as
geometrically. Discuss rotation, shear, dilation and projection.
For projection, first review the unit
circle
execute:
A:=Matrix([[(cos(theta))^2,cos(theta)*sin(theta)],[cos(theta)*sin(theta),
((sin(theta))^2)]]);
h,P:=Eigenvectors(A)
Diag:=simplify(MatrixInverse(P).A.P);
What geometric transformation is Diag?
Notice that P.Diag.MatrixInverse(P) = A by matrix algebra.
Writing out a transformation in terms of a P, the inverse of P, and a
diagonal matrix will prove very useful in computer graphics
[Recall that we read matrix composition from right to left].
Geometric intuition of P.Diag.MatrixInverse(P) = A
If we want to project a vector onto the y=tan(theta) x line,
first we can perform MatrixInverse(P) which takes a vector and rotates it
counterclockwise by theta. Next we perform Diag,
which projects onto the x-axis, and finally we perform P, which rotates
clockwise by theta
Build up intuition for transformations and
part 2.
Thur Nov 15
Clicker review: How many linearly independent eigenvectors does
Matrix([[1,2],[2,1]]) have?
a) 0
b) 1
c) 2
d) infinite
e) none of the above
How many eigenvectors does
Matrix([[1,2],[2,1]]) have?
a) 0
b) 1
c) 2
d) infinite
e) none of the above
An eigenvector allows us to turn:
a) Matrix multiplication into matrix addition
b) Matrix addition into matrix multiplication
c) Matrix multiplication into scalar multiplication
d) Matrix addition into scalar multiplication
e) none of the above
Explain why the eigenvectors of Matrix([[1,2],[2,1]])
satisfy the definitions of span and li
by setting up the corresponding equations and solving.
li :=
span:=
Also do to see that
MatrixInverse(P).A.P
has the eigenvalues on the diagonal - definition of diagonalizability.
Derivation that for eigenvectors x for A, Akx =
lambda kx
Derivation that
A P = P times the diagonal matrix of eigenvalues [which is how we showed that
MatrixInverse(P).A.P = Diag]
Eigenvector decomposition for a diagonalizable matrix A
Finish the last 3
eigenvectors clicker questions.
Foxes and Rabbits demo on ASULearn. 7.2.
Tues Nov 13 Take questions on the eigenvector hw on the
Healthy Sick worker problem from Problem Set 3.
Begin 7.1
Define eigenvalues and eigenvectors [Ax=lambdax, vectors that are scaled on
the same line through the origin, matrix multiplication is turned into scalar
multiplication].
Prove that we can solve using det(lambdaI-A)=0 and
(lambdaI-A)x=0
Compute the eigenvectors of Matrix([[0,1],[1,0]] by-hand and compare
with Maple's work. Mention
the book presenting the coefficient matrix instead of the augmented matrix for
the system (lambdaI-A)x=0 [Ax=lambdax].
See where points that make up a square go: [0,0], [1,0], [0,1], [1,1]
and then [-1,1]. What kind of geometric transformation is this?
Then compare with the
Geometry of Eigenvectors to examine
the type of geometric transformation.
We'll be working with rotations, reflections and projections,
dilations, translations and shears here and in computer graphics.
Eigenvectors and eigenvalues of Matrix([[1,2],[2,1]) in Maple.
Begin eigenvectors clicker questions.
Thur Nov 8 Test 2
Tues Nov 6
Continue 4.5
clicker questions.
Mention the ice cream mixing questions, which we will come back to if
there is time.
Review the Healthy Sick worker problem from Problem Set 3. Begin 7.1
Define eigenvalues and eigenvectors [Ax=lambdax, vectors that are scaled on
the same line through the origin, matrix multiplication is turned into scalar
multiplication]. Examine
Geometry of Eigenvectors
Take questions on the test.
chap 4 clicker review questions.
Finish 4.5 clicker questions.
Thur Nov 1
Take questions on 4.6 from hw readings as well as the file
Span and Linear Independence comments from
hw.
Definitions.
Prove that span + l.i. for a basis give a unique representation.
Begin 4.5 clicker questions
Tues Oct 30 *****SNOW DAY****
Look at Span and Linear
Independence comments.
Definitions.
First 2 problem set questions - revisit using the language of span
and li
Prove that span + l.i. for a basis give a unique representation.
4.6 and revisit problem set 1 questions in this context.
4.5 clicker questions
Thur Oct 25
Definitions.
4.4 clicker questions.
Revisit ps 4 numbers 1 and 2 in the language of span and l.i.
Are Vector([1,2,3]), Vector([0,1,2]), Vector([-2,0,1]) linearly
independent?
Are Vector([1,2,3]), Vector([0,1,2]), Vector([-1,0,1]) linearly
independent?
If not, what do they span geometrically and algebraically?
Maple work
Maple Code:
with(LinearAlgebra): with(plots):
a1:=spacecurve({[1*t,2*t,3*t,t=0..1]},color=red, thickness=2):
a2:=textplot3d([1,2,3, ` vector [1,2,3]`],color=black):
b1:=spacecurve({[0*t,1*t,2*t,t=0..1]},color=green, thickness=2):
b2:=textplot3d([0,1,2, ` vector [0,1,2]`],color=black):
c1:=spacecurve({[-2*t,0*t,1*t,t=0..1]},color=magenta, thickness=2):
c2:=textplot3d([-2,0,1, ` vector [-2,0,1]`],color=black):
d1:=spacecurve({[0*t,0*t,0*t,t=0..1]},color=yellow, thickness=2):
d2:=textplot3d([0,0,0, ` vector [0,0,0]`],color=black):
display(a1,a2, b1,b2,c1,c2,d1,d2);
Tues Oct 23
Rotation matrices using multiplication satisfying ax 1-5, but
violating 6. Solutions to Ax=[1 2] column vectors.
Begin 4.4 and 4.5: Representations of R^2 and R^3 under linear combinations -
ie does a set of vectors span and if not, what linear space
through the origin is the span?
Definitions.
column vectors sets to test span (always inconsistent when augmenting with
(x,y) or (x,y,z)):
(0,0)
(0,1) and (0,2)
(1,0), (0,1)
(1,0), (0,1), and (1,1)
(1,0,0), (0,1,0), and (0,0,1)
(1,4,7), (2,5,8), and (3,6,9)
(1,4,7), (2,5,8), and (3,7,9)
any set of 2 vectors in R^3
linear independence for (0,1) and (0,2)
Thur Oct 18
Continue 4.2 and 4.3.
x+y+z=0 in R^3.
a) satisfies both axiom 1 and 6
b) satisfies axiom 1 but not axiom 6
c) satisfies axiom 6 but not axiom 1
d) satisfies neither axiom 1 nor axiom 6
Continue
generating vector spaces in R^2 and R^3 under linear combinations.
A proof of the subspaces of R^3.
nxn matrices that have columns adding to 1
a) satisfies both axiom 1 and 6
b) satisfies axiom 1 but not axiom 6
c) satisfies axiom 6 but not axiom 1
d) satisfies neither axiom 1 nor axiom
The union of the lines y=x and y=-x [ie column vectors [x,y]
that satisfy y=x or y=-x]
a) satisfies both axiom 1 and 6
b) satisfies axiom 1 but not axiom 6
c) satisfies axiom 6 but not axiom 1
d) satisfies neither axiom 1 nor axiom
Tues Oct 16
Review the language of linear combinations:
The vector x is a linear combination of the vectors v1,...,vn if
a) x can be written as a combination of addition and/or scalar
multiplication of the vectors v1,...,vn
b) x is in the same geometric (and linear) space
that the vectors v1,...,vn form under linear combinations
(line, plane, R^3...)
c) both a and b
d) neither a nor b
Revisit the
1 2 3
4 5 6
7 8 9
determinant 0 matrix
with(LinearAlgebra):
with(plots):
col1 := spacecurve([t, 4*t, 7*t], t = 0 .. 1):
col2 := spacecurve([2*t, 5*t, 8*t], t = 0 .. 1):
col3 := spacecurve([3*t, 6*t, 9*t], t = 0 .. 1):
display(col1, col2, col3):
Then change the 6 to a 7 in the last column and discuss using the
language of linear combinations, as well as the determinants
Begin 4.2 and 4.3, including solutions to
y=3x+2 and y=3x in R^2. Look at a proof of all the subspaces of R^2.
Tues Oct 9 Clicker
questions 4.1 Finish
Geometry of determinants and row operations via demo on ASULearn.
Linear combinations.
Discuss what c1v1+c2v2=b could look like for various v1 and v2. Look at the
resulting matrix equation: [v1 v2]c=b with v's as columns. The augmented
matrix is [v1 v2|b].
Coffee Mixing
as well as the geometry of the columns (chap 4) and the
rows (chap 1) and numerical methods issue related to decimals versus
fractions.
Thur Oct 4 Test 1
Tues Oct 2 Look at tu+v
as vectors whose tips lie on the line that goes through the tip of v and is
parallel to u. Revisit the proof that there are 0, 1 or infinite solutions to
a linear system, and see that sol1 + t (sol1-sol2) is vectors whose tips end
on the line connecting the tips of sol1 and sol2 [t=0 and t=-1 for example].
Geometry of determinants and row operations via demo on ASULearn. Take
questions on Test 1.
Thur Sep 27 Continue with 3.3 derivations.
Finish Chapter 3 clicker questions.
Begin the algebra and geometry of column vectors: scalar
multiplication and addition revisited, as well as the geometry.
Tues Sep 25 Continue determinant work via Laplace's expansion
method and the relationship of row operations to determinants.
Chapter 3 clicker questions.
Thur Sep 20
Finish Markov/stochastic/regular matrices.
Hill cipher using matrices
Patent
Diagrams
Hill Cipher slides
Discuss regression line.
3.1-3.2: Begin Chapter 3
in Maple via MatrixInverse command for 2x2 and 3x3 matrices and then
determinant work.
Chapter 3 clicker questions
Tues Sep 18
chapter 2 clicker review
Begin 2.5: Applications of the algebra of matrices in 2.5:
Review:
Matrix Multiplication: profit (units must match up for this to be
the case), rotation matrices in 2.1 #32 practice problems,
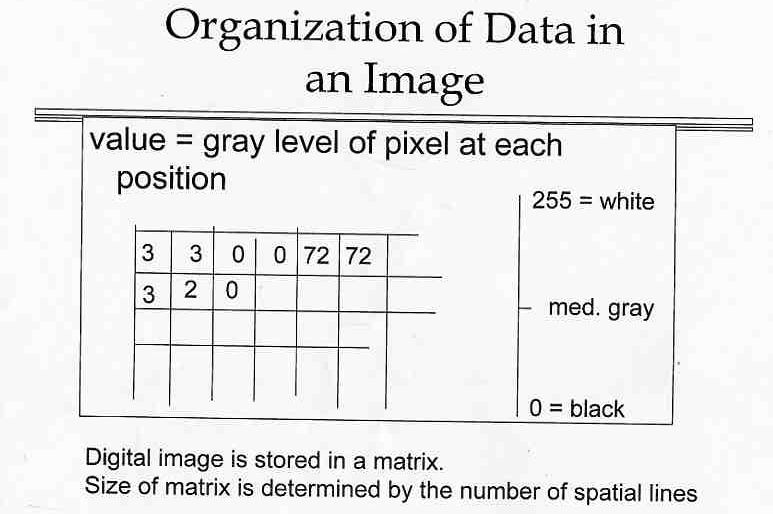
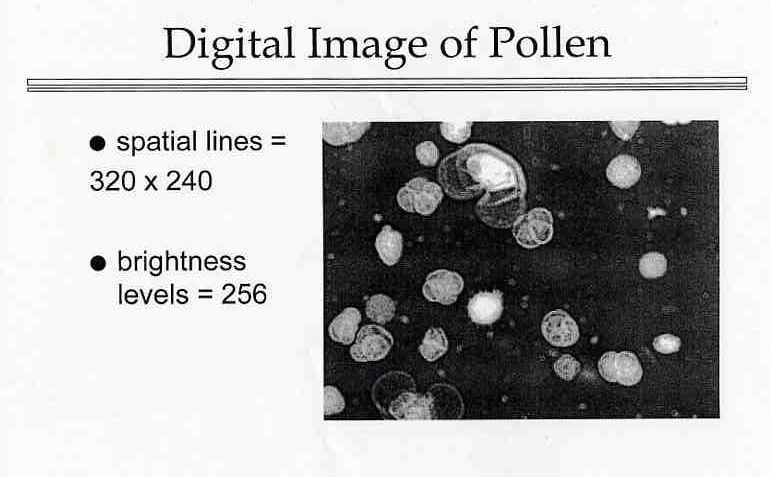
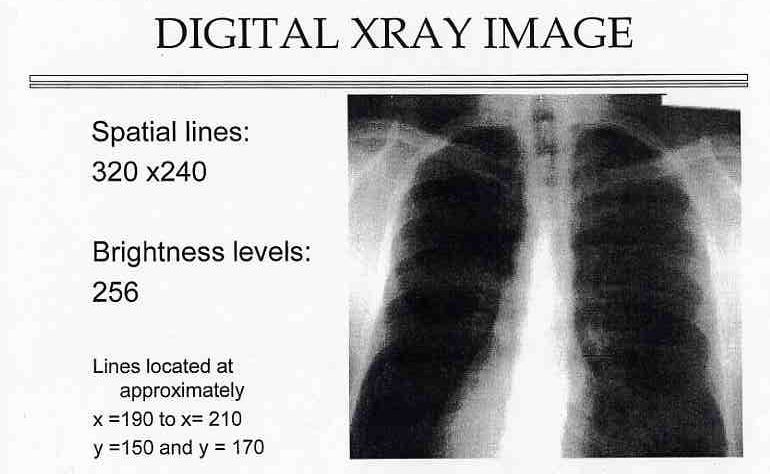
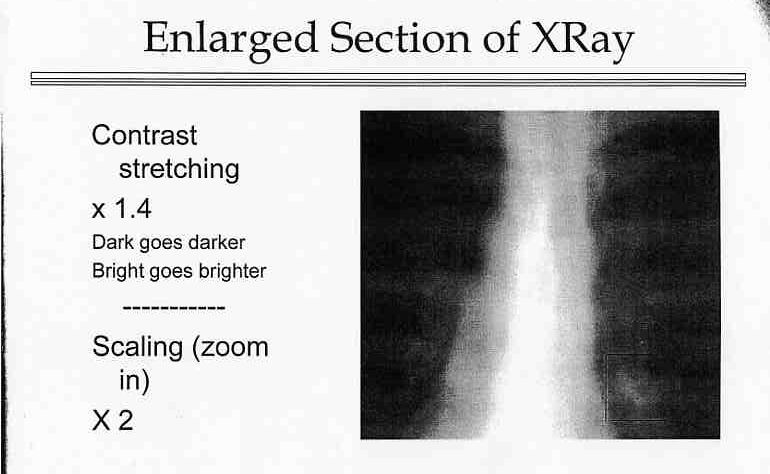
Matrix addition: adding digital images, adding sales month to month...
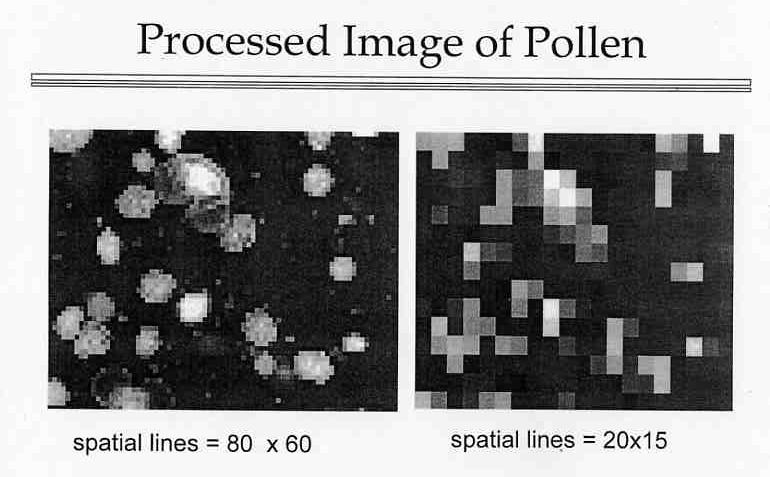
Scalar multiplication: scaling images, 1.2*J target sales for a 20%
increase...
2.5:
2.5 clicker question.
Markov/stochastic/regular matrices.
Thur Sep 13
Finish 2.3:
Continue with the algebra of matrices.
Prove that in a linear system with n variables and n equations there may
be 0, 1 or infinite solutions.
Tues Sep 11
Finish the
2.1 and
2.2 clicker questions
Review ps1 #5 (44 part d): If k=-6 then
a) there are no solutions
b) there is a unique solution
c) there is an entire line of solutions
d) there is an entire plane of solutions
e) I don't know
Review 2.1 #32 and that we will see these later as representing rotation matrices where A(alpha)*A(beta) = A(alpha +beta).
Review 2.2 #35 part c: To solve this problem....
a) We can set a, b, c=0. We know 0*matrix = matrix of all 0s, so
when we add the three trivial (all 0s)
column vectors together we obtain the trivial column vector, as desired.
b) We can leave a, b, c as general constants, like in the previous k
problem, and then using matrix algebra we obtain a system of three equations in the three unknowns. We can create a corresponding matrix for the system
and use Gauss-Jordan on it to show that (0,0,0) is the only solution for
(a,b,c)
c) Both of the methods described in a) and b) work to solve this problem.
d) Neither of the methods work to answer the question.
Do 2.3.
Tues Sep 4
Begin with
first few 2.1 and
2.2 clicker questions including matrix addition.
Image 1
Image 2
Image 3
Image 4
Image 5
Image 6
Image 7.
Powerpoint file.
Continue with the matrix multiplication clicker questions.
Thur Aug 30
Register remaining i-clickers.
Go over text comments in Maple and distinguishing work as your own.
Which of the following are true regarding problem sets (like due on
Tues):
a) I am only allowed to use the book, my group members, the math
lab and Dr. Sarah for help on the problem set.
b) I can use any source for help, but
the work and explanations must be distinguished as originating from my
own group.
c) I must acknowledge any help, like
"the idea for problem 1 came from discussions with johnny."
d) Both b) and c)
1.3 via the traffic problem and mention a
circuit Gaussian review, which
includes both same number of unknowns as variables as well as a
different number of unknowns as variables.
Tues Aug 28
Register remaining i-clickers.
Gauss quotation
Go over 59 b and 73 from the hw. Discuss the Problem Set Guidelines,
Write-Ups and hand out the Commands and Hints.
We already saw examples of matrices with 0 solutions, via parallel planes, as well as 3 planes that just don't intersect concurrently:
implicitplot3d({x-2*y+z-2, x+y-2*z-3, (-2)*x+y+z-1}, x = -4 .. 4, y = -4 .. 4, z = -4 .. 4)
implicitplot3d({x+y+z-3, x+y+z-2, x+y+z-1}, x = -4 .. 4, y = -4 .. 4, z = -4 ..
4)
Finish Questions.
In 3-D how many solutions to a linear system of equations are
possible? What is the geometry? What is the Gaussian reduction?
How about a system that intersects in one point? Infinite solutions and
parametrizations.
Thur Aug 23
Register i-clickers.
Take questions on the syllabus and hw.
History of linear equations and the term "linear algebra"
images, including the Babylonians 2x2 linear
equations, the
Chinese 3x3 column elimination method over 2000 years ago, Gauss' general
method arising from geodesy and least squares methods for celestial
computations, and Wilhelm's contributions for
3 equations 2 unknowns with one solution. 3 equations 3 unknowns with
infinite solutions.
Questions.
Algebraic and geometric perspectives in 3-D and
solving using by-hand
elimination,
and ReducedRowEchelon and GaussianElimination.
Tues Aug 21
Fill out the information sheet
and work on the introduction to linear algebra handout motivated from
Evelyn Boyd Granville's favorite problem.
At the same time, begin 1.1 and 1.2 including geometric perspectives,
by-hand algebraic Gaussian Elimination, solutions,
plotting and geometry, parametrization and GaussianElimination in Maple. In addition, do #5 with
k as an unknown but constant coefficient. Prove using geometry that the number of solutions of a system
with 2 equations and 2 unknowns is 0, 1 or infinite.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}