2240 class highlights
Tues May 1
applications of linear algebra
Share the final research presentations topic (name, major(s),
concentrations/minors, research project idea, and whether you prefer to go 1st, 2nd or have no preference).
rubric for the final project
MathSciNet Hill cipher. Leontief. Search within matrix/matrices
evaluations
Thur Apr 27
final research presentations
evaluations
test 2 corrections
presentation session,
course overview
sample project,
full guidelines, rubric for the final project
Tues Apr 25 Test 2
Thur Apr 20
Math Awareness Month
uncover the mystery of inverse(P).A.P=?,
Diagonalization and apply to computer graphics
Applications to mathematical physics,
quantum chemistry..., Eigenfunction, Tacoma Narrows,
full guidelines and rubric for the final project
evaluations
Test 2 review, topics to study, Test 1 review
Thur Apr 13
Clicker questions---review of
eigenvectors
reviewing,
course goals
April is Mathematics Awareness Month
THE $25,000,000,000 EIGENVECTOR by Kurt Bryan and Tanya Leise
About once a month, Google finds an eigenvector of a
matrix that represents the connectivity of the web (of size
billions-by-billions) for its pagerank algorithm.
http://languagelog.ldc.upenn.edu/nll/?p=3030
presentation session,
final research presentations Chinese,
German Gauss, French Laplace, German polymath Hermann Grassman (1809-1877) 1844: The Theory of
Linear Extension, a New Branch of Mathematics (extensive magnitudes---effectively linear space via linear combinations, independence, span, dimension, projections.)
Hamburger earmuffs and the pickle matrix
sample project,
full guidelines
rubric for the final project
Big picture discussion
Tues Apr 11
Clicker questions---
eigenvector decomposition (5.6) part 2
reviewing
Fill in examples on Terms for Exam 2
Dynamical Systems and
Eigenvectors
Thur Apr 6
Clicker questions in 5.1#1-3
Review first example on Dynamical Systems and
Eigenvectors
Clicker questions on
eigenvector decomposition (5.6) part 1#2-4
[Solutions: 1. a), 2. c), 3. c), 4. b)]
Review reflection across y=x line
via pictures. A few inputs. Where is the output? Is the vector
an eigenvector?
>Ex1:=Matrix([[0,1],[1,0]]);
>Eigenvalues(Ex1);
>Eigenvectors(Ex1);
Geometry of Eigenvectors examples 1 and 2 and compare with Maple
>Ex2:=Matrix([[0,1],[-1,0]]);
>Ex3:=Matrix([[-1,0],[0,-1]]);
>Ex4:=Matrix([[1/2,1/2],[1/2,1/2]]);
Horizontal shear Matrix([[1,k],[0,1]]) and via det (A-lamda I)=0. Once given lambda, what is the eigenvector basis?
Tues Apr 4
eigensheep comic and review algebra of eigenvalues and eigenvectors
Eigenvalues of triangular matrices like shear matrix are on the diagonal-- characteristic equation.
Matrix([[2,1],[1,2]])
M := Matrix([[2,1],[1,2]]);
Eigenvectors(M);
Eigenvector comic 1
Begin 5.6: Eigenvector decomposition for a diagonalizable
matrix A_nxn [where the eigenvectors form a basis for all of Rn].
M := Matrix([[6/10,4/10],[-125/1000,12/10]]);
Eigenvectors(M);
Application: Foxes and Rabbits
Also revisit the black hole matrix.
Clicker questions on
eigenvector decomposition (5.6) part 1#1-2
Compare with Dynamical Systems and
Eigenvectors first example
Highlight predator prey, predator predator or cooperative systems
(where cooperation leads to sustainability)
Eigenvector comic 2
Thur Mar 30
Take questions on determinants.
Clicker questions in Chapter 3 9
basis, null space and column space
clicker in 2.8#2-3
algebra of eigenvalues and eigenvectors and connect to geometry
Matrix([[2,1],[1,2]])
Tues Mar 28
Take questions on determinants.
mapping course goals to the text
If space is the final frontier, then what's a subspace?
subspace,
basis, null space and column space
2.8 using the matrix 123,456,789 and finding the Nullspace and
ColumnSpace (using 2 methods - reducing the spanning equation with a vector
of b1...bn, and separately by examining the pivots of the ORIGINAL matrix.)
Add to the terms. Two other examples.
nullspace
clicker in 2.8 1
Thur Mar 23
Review determinants LaTex Beamer slides
via Clicker questions in Chapter 3 #10, 4-8
The relationship of row operations to the
geometry of determinants - row operations can be seen as vertical
shear matrices
when written as elementary matrix form, which preserve area, volume, etc.
If space is the final frontier, then what's a subspace?
Tues Mar 21
Chapter 3 in Maple via MatrixInverse command for 2x2 and 3x3 matrices and
then determinant work, including 2x2 and 3x3 diagonals methods,
and Laplace's expansion (1772 - expanding on Vandermonde's
method) method in general. [general history dates to Chinese and Leibniz]
M:=Matrix([[a,b,c],[d,e,f],[g,h,i]]);
Determinant(M); MatrixInverse(M);
M:=Matrix([[a,b,c,d],[e,f,g,h],[i,j,k,l],[m,n,o,p]]);
Determinant(M); MatrixInverse(M);
LaTex Beamer slides
The
determinator comic, which has lots of 0s
The connection of row operations to determinants
The determinant of A transpose and A triangular (such as in Gaussian form).
The determinant of A inverse via the determinant of the product of A and A inverse - and via elementary row operations - so det A non-zero can be added into Theorem 8 in Chapter 2: What Makes a Matrix Invertible.
Mention google searches: application of determinants in physics application of determinants in economics application of determinants in chemistry application of determin ants in computer science Eight queens and determinants application of determinants in geology: volumetric strain
3.3 p. 180-181:
Begin the relationship of row operations to the
geometry of determinants - row operations can be seen as vertical
shear matrices
when written as elementary matrix form, which preserve area, volume, etc.
Thur Mar 9
rotation matrix and 6.1
Review linear transformations of the
plane, including homogeneous coordinates
glossary of terms
rotation matrix and 6.1
Application of 2.7 and 6.1: Keeping a car on a
racetrack
Begin Yoda (via the file yoda2.mw) with data from
Kecskemeti B. Zoltan (Lucasfilm LTD) as on
Tim's page
Clicker questions in 2.7 #7, 8 and 9
Clicker questions in Chapter 3 #1-3
Tues Mar 7 Test 1
Thur Mar 2
Review linear transformations of the plane,
including homogeneous coordinates
Clicker questions in 2.7 #4-6
Computer graphics demo [2.7] Examples 3-5
Test 1 review and take questions
Time to study for the test or work on 1.9 and 2.7 hw
Tues Feb 28
Guess the transformation.
In the process, discuss that the first column of the matrix representation is the same as the output of the unit x vector, and that invertible matrices will take the plane to the plane (the range is onto the plane), while matrices that are not invertible do not span the entire plane, so they smush the
plane (pictures in the plane, etc).
Mirror mirror comic and
Sheared Sheap comic
Glossary of terms
general geometric transformations on
R2 [1.8, 1.9]
In the process, review the unit
circle
Computer graphics demo [2.7] Examples 1-2
Clicker questions in 2.7 #1-3
Thur Feb 23
Clicker questions in 2.2 #4-5
Clicker questions in 2.3 and Hill Cipher and Condition Number
review of Hill cipher and condition number
What makes a matrix invertible
Applications of 2.1-2.3: 1.8 (p. 62, 65, & 67-68), 1.9 (p. 70-75), and 2.7
Guess the transformation.
In the process, discuss that the first column of the matrix representation is the same as the output of the unit x vector, and that invertible matrices will take the plane to the plane (the range is onto the plane), while matrices that are not invertible do not span the entire plane, so they smush the plane (pictures in the plane, etc).
Tues Feb 21
Clicker questions in 2.2 #1-3
2.1 #23: Assume CA=I_nxn. A doesn't have to be square. 3x2 matrix A.
last slide for advice from students
2.2 #21: Explain why the columns of an nxn matrix A are linearly independent when A is invertible.
problematic reasoning: If the 2 columns of A are multiples the determinant will be 0
incomplete reasoning: the columns of A are li because Ax=0 has only the trivial solution when
A is invertible (why?).
Theorem 8 in 2.3 [without linear transformations]:
What makes a matrix invertible
Discuss what it means for a square matrix that violates one of the statements.
Discuss what it means for a matrix that is not square (all bets are off) via
counterexamples.
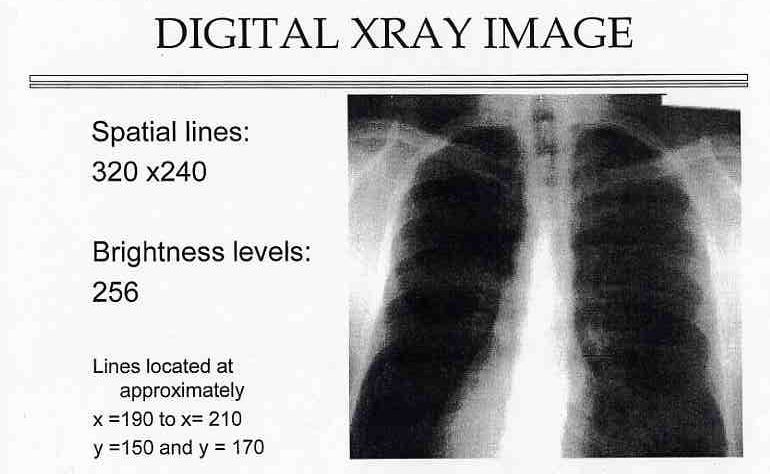
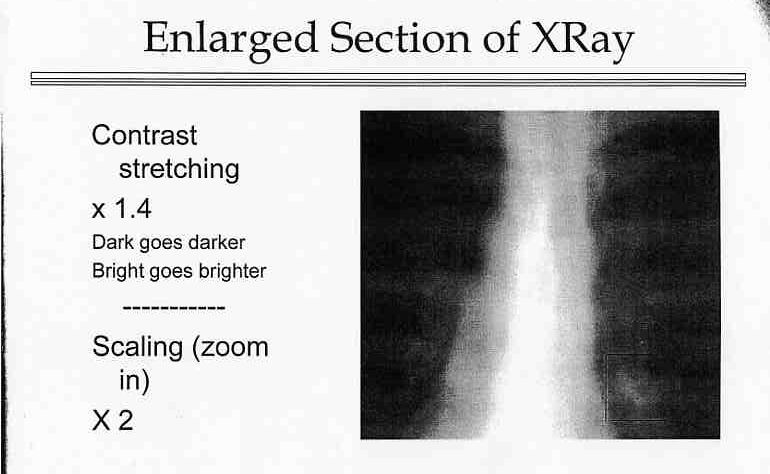
-2.1-2.3 Applications: Hill Cipher, Condition Number and Linear
Transformations (2.3, 1.8, 1.9 and 2.7)
Introduction to Linear Maps
Hill Cipher history
Maple file on Hill Cipher and
Condition Number and
PDF version
review of Hill cipher and condition number
Thur Feb 16
Comic: associativity superpowers
Review 2.1 #23 (multiplicative argument and then pivot argument)
Steps,
The Science of Successful Learning, learn something new
Review 2.2 Algebra: Inverse of a matrix and
2.1 #21.
Clicker in 2.1 and 2.2 continued:
#7 onward
Show that if the columns of a square nxn matrix A span the entire R^n, then A is invertible.
In groups of 2-3 people, assume that A (square) has an inverse.
What else can you say?
Tues Feb 14
Continue matrix algebra including addition and scalar multiplication.
Then 2.1 question, matrix multiplication and
matrix algebra. AB not BA...
Introduce transpose of a matrix via Wikipedia,
including Arthur Cayley. Applications including least squares estimates,
such as in linear regression, data given as rows (like Yoda).
twobytwo := Matrix([[a, b], [c, d]]);
MatrixInverse(twobytwo);
MatrixInverse(twobytwo).twobytwo
simplify(%)
2.2 Algebra: Inverse of a matrix.
Repeated methodology: multiply by the inverse on both sides,
reorder by
associativity, cancel A by its inverse, then reduce by the identity to
simplify.
comic. Find the identity of superman
Applications of multiplication and the inverse (if it exists)
Thur Feb 9
Review
1.7 definition of linearly independent
dependence comic
Review Maple commands Maple file
Review 1.1, 1.2, 1.3, 1.4, 1.5, 1.7
clicker review questions 4-9
Begin Chapter 2:
Image 1
Image 2
Image 3
Image 4
Image 5
Image 6
Image 7.
glossary for 2.1-2.3 and matrix algebra
Tues Feb 7
Clicker question to motivate 1.7
How to express redundancy?
1.7 definition of linearly independent and
connection to efficiency of span
In R^2: spans R^2 but not li, li but does not span R^2, li plus spans R^2.
Clicker questions in 1.7 and the theorem about l.i. equivalences in 1.7.
Roll Yaw Pitch Gimbal lock on Apollo 11.
Maple commands Maple file
Thur Feb 2
Theorem 4 in 1.4
Clicker question in 1.4
Coff:=Matrix([[.3,.4,36],[.2,.3,26],[.2,.2,20],[.3,.1,18]]);
ReducedRowEchelonForm(Coff);
Coffraction:=Matrix([[3/10,4/10,36],[2/10,3/10,26],[2/10,2/10,20],[3/10,1/10,18]]);
ReducedRowEchelonForm(Coffraction);
Decimals (don't use in Maple) and fractions. Geometry
of the columns as a plane in R^4, of the rows as 4
lines in R^2 intersecting in the point (40,60).
1.5: vector parametrization equations of homogeneous and non-homogeneous equations. Introduce t*vector1 + vector2 is the collection of vectors that end on the line parallel to vector 1 and through the tip of vector 2
Clicker question in 1.3 and 1.5 #5
Tues Jan 31
Review vectors, addition, scalar multiplication, linear combinations
and span of them
What's your span? comic.
Clicker questions in 1.3 and 1.5
# 3-4
discuss what happens when we correctly use GaussianElimination(s13n15extension) - write out the equation of the plane that the vectors span.
s13n15extension:=Matrix([[1,-5,b1],[3,-8,b2],[-1,2,b3]]);
GaussianElimination(s13n15extension);
Choose a vector that violates this equation to span all of R^3 instead
of the plane and plot:
M:=Matrix([[1,-5,0,b1],[3,-8,0,b2],[-1,2,1,b3]]);
GaussianElimination(M);
a:=spacecurve({[t, 3*t, -1*t, t = 0 .. 1]}, color = red, thickness = 2):
b:=spacecurve({[-5*t, -8*t, 2*t, t = 0 .. 1]}, color = blue, thickness
= 2):
diagonalparallelogram:=spacecurve({[-4*t, -5*t, -1*t, t = 0 .. 1]},
color = black, thickness = 2):
c:=spacecurve({[0, 0, t, t = 0 .. 1]}, color = magenta, thickness = 2):
display(a,b,c,diagonalparallelogram);
Begin 1.4. Ax via using weights from x for columns of A versus Ax via
dot products of rows of A with x and Ax=b the same (using definition 1 of
linear combinations of the columns) as the augmented matrix [A |b]. The matrix vector equation and the augmented matrix. The matrix vector equation and the augmented
matrix and the connection of mixing to span and linear combinations.
Theorem 4 in 1.4
Thur Jan 26
History of linear equations and the term "linear algebra"
images, including the Babylonians 2x2 linear
equations, the
Chinese 3x3 column elimination method over 2000 years ago, Gauss' general
method arising from geodesy and least squares methods for celestial
computations, and Wilhelm Jordan's contributions.
Gauss quotation. Gauss was also involved in
other linear algebra, including the
history of vectors, another important "linear" object.
Glossary 2: More Terms for Test 1
vectors, scalar mult and addition,
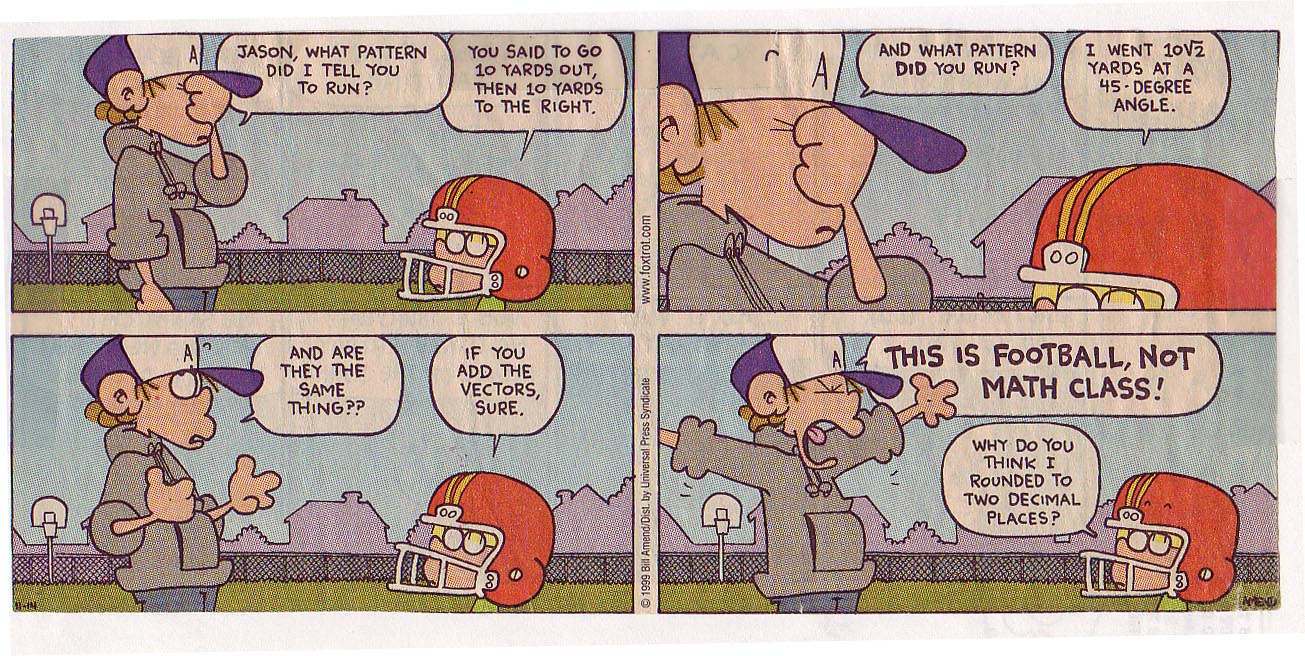
Foxtrot vector addition comic by
Bill Amend. November 14, 1999.
1.3 linear combinations and weights,
vector equations and connection to 1.1 and 1.2 systems of equations and
augmented matrix. linear combination language (addition and scalar
multiplication of vectors).
c1*vector1 + c2*vector2_on_a_different_line is a plane via:
span1:=Matrix([[1, 4, b1], [2, 5, b2], [3, 6, b3]]);
GaussianElimination(span1);
Comment on the span being b1-2b2+b3=0. Notice that Vector([7,8,9])
also satisfies this equation
a1:=spacecurve({[t, 2*t, 3*t, t = 0 .. 1]}, color = red, thickness = 2):
a2:=textplot3d([1, 2, 3, ` vector [1,2,3]`], color = black):
b1:=spacecurve({[4*t,5*t,6*t,t = 0 .. 1]}, color = green, thickness = 2):
b2:=textplot3d([4, 5, 6, ` vector [4,5,6]`], color = black):
c1:=spacecurve({[7*t, 8*t, 9*t, t = 0 .. 1]},color=magenta,thickness = 2):
c2:=textplot3d([7,8,9,`vector[7,8,9]`],color = black):
display(a1,a2,b1,b2,c1,c2);
Replace with [7, 8, 10] which is not in the span.
Clicker questions in 1.3 and 1.5
# 1, 2
Tues Jan 24
Collect hw. Go over the glossary on ASULearn, solutions,
hints, and advice from the last run of the class.
Review the algebra and geometry of eqs with 3 unknowns in R^3
Clicker questions in 1.1 and 1.2 continued
Thur Jan 19
Turn in hw.
Engagement with the the i-clickers
Clicker questions 1.1 and 1.2 #1.
Gaussian and Gauss-Jordan for
3 equations and 2 unknowns in R2.
Clicker on 3eqs 2 vars
Mention where to get help,
solutions and a glossary on ASULearn.
Gaussian and Gauss-Jordan or reduced
row echelon form in general:
section 1.2, focusing on algebraic and geometric perspectives
and solving using by-hand elimination of systems of equations with 3
unknowns. Follow up with
Maple commands and visualization: ReducedRowEchelon and
GaussianElimination as well as implicitplot3d in Maple (like on the
handout):
Drawing the line comic.
Parametrize x+y+z=1.
with(plots): with(LinearAlgebra):
implicitplot3d({x+y+z=1, x+y+z=2}, x = -4 .. 4,
y = -4 .. 4, z = - 4 .. 4);
Ex1:=Matrix([[1,-2,1,2],[1,1,-2,3],[-2,1,1,1]]);
implicitplot3d({x-2*y+z=2, x+y-2*z=3, (-2)*x+y+z=1}, x = -4 .. 4, y = -4 .. 4, z = -4 .. 4);
Ex2:=Matrix([[1,2,3,3],[2,-1,-4,1],[1,1,-1,0]]);
implicitplot3d({x+2*y+3*z=3,2*x-y-4*z=1,x+y-z=0},
x=-4..4,y=-4..4,z=-4..4);
Ex3:=Matrix([[1,2,3,0],[1,2,4,4],[2,4,7,4]]);
implicitplot3d({x+2*y+3*z = 0, x+2*y+4*z = 4, 2*x+4*y+7*z = 4}, x = -13 .. -5, y = -1/4 .. 1/4, z = 3 .. 5, color = yellow);
Ex4:=Matrix([[1,3,4,k],[2,8,9,0],[10,10,10,5],[5,5,5,5]]);
GaussianElimination(Ex4);
Ex4a:=Matrix([[1,3,4,k],[2,8,9,0],[10,10,10,5],[5,5,5,5]]);
GaussianElimination(Ex4);
Highlight equations with 3 unknowns with infinite solutions, one solution
and no
solutions in R3, and the corresponding geometry, as we review
new terminology and glossary of terms
Tues Jan 17
UTAustinXLinearAlgebra.mov. Manga comic
Course intro slides # 1 and 2
Work on the introduction to linear algebra handout motivated from
Evelyn Boyd Granville's favorite
problem (#1-3).
At the same time, begin 1.1 (and some of the words in 1.2)
including geometric perspectives,
by-hand algebraic EBG#3,
Gaussian Elimination and EBG #5 and pivots,
solutions, plotting and geometry, parametrization and GaussianElimination
in Maple for systems with 2 unknowns in R2.
Evelyn Boyd Granville #3:
with(LinearAlgebra): with(plots):
implicitplot({x+y=17, 4*x+2*y=48},x=-10..10, y = 0..40);
EBG3:=Matrix([[1,1,17],[4,2,48]]);
GaussianElimination(EBG3);
ReducedRowEchelonForm(EBG3);
In addition, do #4
Evelyn Boyd Granville #4: using the slope of the lines, versus full
pivots in Gaussian (r2'=-4 r1 + r2):
EBG4:=Matrix([[1,1,a],[4,2,b]]);
GaussianElimination(EBG4);
Course intro slides last 2 slides
Evelyn Boyd Granville #5 with
k as an unknown but constant coefficient.
EBG#3,
Gaussian Elimination and EBG #5
EBG5:=Matrix([[1,k,0],[k,1,0]]);
GaussianElimination(EBG5);
ReducedRowEchelonForm(EBG5);
Prove using geometry of lines
that the number of solutions of a system
with 2 equations and 2 unknowns is 0, 1 or infinite.
How to get to the main calendar page: google Dr. Sarah /
click on webpage / then 2240. Discuss webpages, hw and
Polya's How to Solve it
Vocabulary/terms/ASULearn glossary
{kind=link}
{kind=link}
![Horizontal shear Matrix([[1,k],[0,1]])](http://en.wikipedia.org/wiki/Eigenvalues_and_eigenvectors#mediaviewer/File:Mona_Lisa_eigenvector_grid.png){kind=link}
![Matrix([[2,1],[1,2]])](http://en.wikipedia.org/wiki/File:Eigenvectors-extended.gif){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}